内容控制系统PID控制器的基本理念是读取感应器,根据计算比例、积分、微分响应得出期望的激励器输出,将三个值相加计算输出。 开始定义PID控制器之前,要先了解闭环系统及其相关术语。
闭环系统
在一个典型的控制系统里,过程变量是需要被控制的系统变量。例如,温度(ºC)、压强(psi)、流速(升/分钟)。 传感器用来测量过程变量,并对控制系统做出反馈。 设定值是过程变量的期望值或必须达到的值。例如,在一个温控系统中,设定温度值为100摄氏度。 在任意时间点上,控制系统算法(补偿器)使用过程变量和设定值之间的差值,得到期望的激励器输出,驱动系统(设备)。 例如,如测量得到的温度过程变量为100 ºC,期望的温度设定值为120 ºC,控制器算法的激励器输出将指示打开加热器。 打开加热器,整个系统就逐渐变热,温度过程变量测得的结果也会增加。 这就是一个闭环控制系统,读取传感器,提供即时反馈,计算期望的激励器输出,这三项操作以固定速率循环往复,如图1所示。
在很多情况下,激励器输出不是对系统有影响的唯一信号。 例如,在温度舱内,可能会有冷空气源。冷空气吹入舱内时,会扰动环境温度。这类扰动因素叫做干扰。 设计控制系统时,通常会尽可能减少对过程变量的干扰因素。
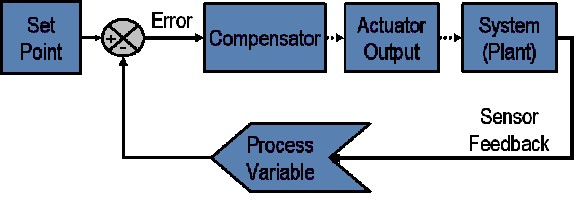
图1:典型闭环系统的示意图
术语定义
控制设计过程从定义性能需求开始。 控制系统的性能一般通过应用一个阶跃函数作为设定值命令变量,然后测量过程变量的响应。 一般来说,通过测量定义的波形特征来量化响应。 上升时间是系统从稳定状态(或最终值)的10%上升到90%所需的时间。 过冲百分比是过程变量超过最终值的百分比数,以最终值的百分比表示。 稳定时间是过程变量值稳定在最终值5%范围内所需的时间。 稳定状态误差是过程变量和设定值之间的差值。 这些值的确切定义在学术和工业上的定义不尽相同。
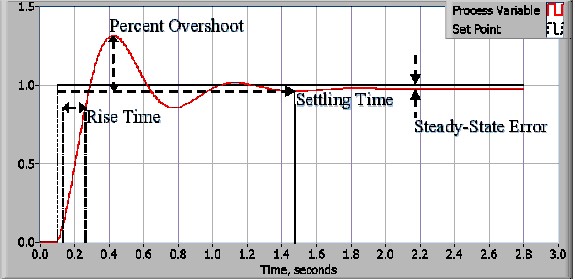
图2:典型闭环系统的响应
使用这些量来定义控制系统的性能要求时,需定义控制系统满足这些需求时可能遇到的“最坏情况”。 一般而言,系统中都有一个影响过程变量或过程变量测量值的干扰。 所以,要设计一个在最坏情况下都能满意工作的控制系统。 控制系统克服干扰的能力,被称为控制系统的干扰抑制。
在某些情况下,对于一个给定控制输出的系统反馈可能会因时间变化。 在非线性系统中,控制参数在某个时刻给出的期望响应,但是在另一个时刻可能无法给出满意的响应。 例如,舱室中几乎为空时,其对加热器输出的响应比舱室填满或几乎填满液体时更快。 控制系统对干扰和非线性的耐受度,被称为控制系统的稳定性。
有些系统会出现非预期的不响应期。 不响应期是过程变量改变和观测到该改变之间的时间延迟。 例如,如温度传感器离冷水阀较远,传感器无法立即监测到冷水阀打开或关闭。 不响应期也可能是因为系统或输出激励器响应控制命令比较缓慢。例如,阀门打开和关闭的速度很缓慢。 在化工厂,造成不响应期的常见原因是化学试剂在管道中流通需要时间。
循环周期也是闭环系统的重要参数。 调用控制算法之间的时间间隔是循环周期时间。 变化迅速或操作复杂的系统,需要更快的循环速率。
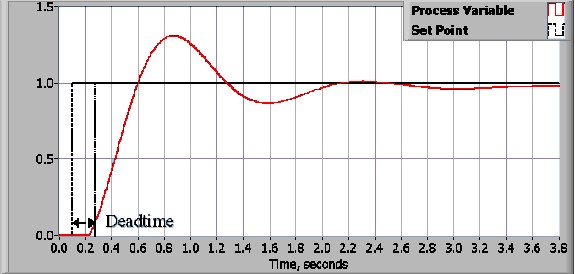
图3:闭环系统的响应及其不响应期
一旦指定了性能需求,即可开始检查系统并选择合适的控制方案。 在大多数应用中,PID控制程序必须提供结果。
[url=]返回顶部[/url]
PID理论
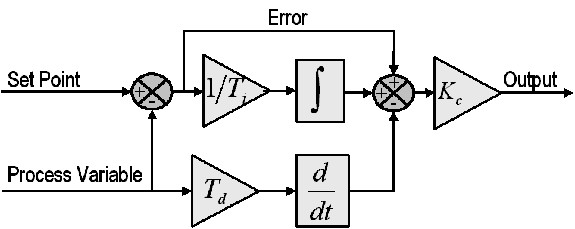
比例响应
比例模块取决于设定值和过程变量之间的差值。 这个差值被称为“误差”。 比例增益 (Kc)决定了输出响应对误差信号的比例。 例如,误差为10,比例增益为5时,比例响应为50。一般而言,提高比例增益会增加控制系统响应的速度。 但是,如果比例增益太大,过程变量会有振荡。 如果继续增加Kc,系统振荡会越来越大,以至于超出控制,使得系统变得不稳定。
图4:基本PID控制算法的示意图
积分响应
积分模块将一段时间内的误差相加。 即使是一个很小的误差,也会让积分响应缓慢增加。 积分响应会根据时间持续增加,除非误差为0。积分响应的目的在于将稳定状态的误差保持在0。 稳定状态误差是过程变量和设定值之间的差值。 当积分操作满足了控制器的条件,而控制器还未将误差保持在0时,会产生积分饱和的结果。
微分响应
微分模块在过程变量迅速增大时停止输出。 微分响应与过程变量变化的速度之间成比例关系。 增加微分时间(Td)会使控制系统对误差的反应更加剧烈,会增加整个控制系统的响应时间。 大多数实用控制系统使用非常小的微分时间(Td),因为微分响应对过程变量的噪声特别敏感。 如传感器反馈信号中有噪声或控制循环速率太低,微分响应会使控制系统变得不稳定。
[url=]返回顶部[/url]
整定
设置P、I、D最佳增益,从而得到控制系统理想反馈的过程叫做整定。 整定方法有很多种。本文主要介绍试错法和Ziegler Nichols法。
可通过试错法获得PID控制器的增益。 当了解了每个增益参数的有效性后,该方法就变得相对简单。 在该方法中,先将I、D设置为0,比例增益增加到循环输出开始振荡为止。 增加比例增益时,系统变得更快,但是要保证系统不会变得不稳定。 一旦设置P去获取期望的快速响应,积分项会增加以停止振荡。 积分项会减少稳定状态的误差,但是会增加过冲。 合理的过冲对于一个快速系统来说是必要的,这样才能立即响应变化。 调整积分项,可达到最小稳定状态误差。 一旦设置了P、I获取有最小稳定状态误差的快速控制系统,微分项会一直增加直到循环对于设定值来说足够快。 增加微分项会减少过冲,产生更高的稳定性增益,但系统会对噪声变得异常敏感。 大多数情况下,工程师在设计时,需要权衡控制系统的各种特性,然后进行取舍。
Ziegler-Nichols是整定PID控制器的通用方法。 该方法与试错方法类似,将I、D设置为0,P增加到循环开始振荡为止。 一旦发生振荡,需观察关键增益Kc和振荡周期Pc。 然后根据下表所示调整P、I、D。
表1:Ziegler-Nichols整定,使用振荡法
[url=]返回顶部[/url]
NI LabVIEW和PIDLabVIEW PID工具包为PID控制系统设计提供各种简单易用的VI。 PID VI具有控制输出范围限制、集成器防饱和、对PID增益改动稳定输出等功能。 PID高级VI包括PID VI的所有功能。此外,PID VI还有非线性积分、双自由度控制和误差平方控制等功能。
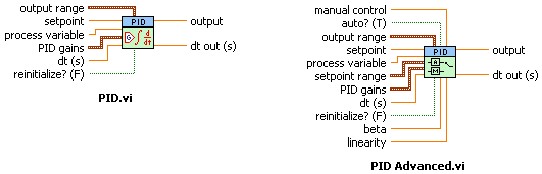
图5:LabVIEW PID控制选板上的VI
PID选板上还有一些高级VI。例如,PID自整定VI、PID增益调度VI,等等。 PID自正定VI用于优化控制系统的PID参数。 给出P、I、D的估计值后,PID自整定VI帮助优化PID参数,从而获取控制系统的最佳响应。
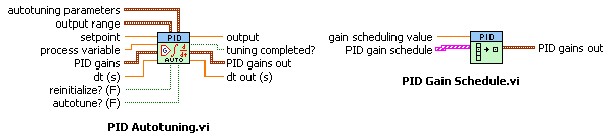
图6:LabVIEW PID控制选板上的高级VI
使用实时终端上的LabVIEW Real-Time模块后,控制系统的可靠性大幅提高。 National Instruments提供M系列数据采集卡,与一般的控制系统相比,具有更高的精度和性能。
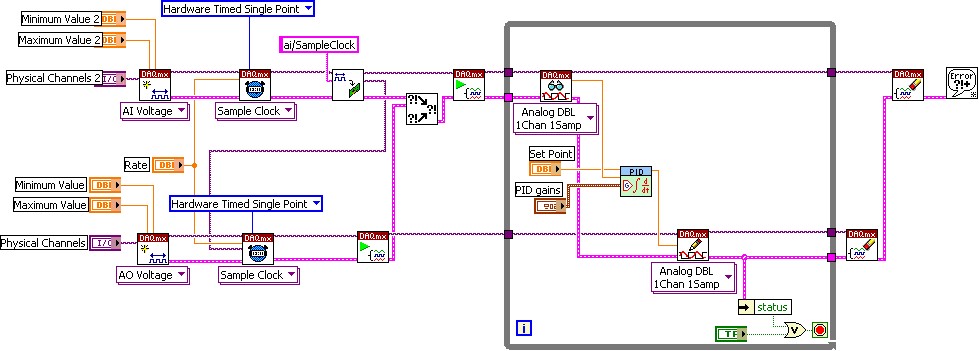
图7:使用NI采集设备的PID控制VI
LabVIEW与M系列板卡的紧密集成极大地减少了开发时间,提高了工程师的效率。 图7显示了使用M系列数据采集设备和NI-DAQmx API的PID VI。
[url=]返回顶部[/url]
总结
PID控制算法是可靠且简便的控制算法,在业内使用广泛。 该算法灵活度高,在各种应用中表现优异,被广泛认可。 NI LabVIEW和NI数据采集设备具有更高的精度和性能,帮助您搭建一个出色的PID控制系统。




 发表于 2020-7-1 20:24:41
发表于 2020-7-1 20:24:41