|
SLAM综述性特别是原理讲述比较浅显易懂的的资料比较少,相对比较知名的是《SLAM for Dummies》,但中文资料相对较少,这里就简单概述一下《SLAM for Dummies》的核心内容。
(一) SLAM for Dummies中SLAM的基本模块
SLAM的基本组成包括:地标(Landmark)抽取、数据关联、系统状态变量估计、基于观测值得系统状态变量更新,以及地标更新。SLAM for Dummies主要描述了2D场景下的地图构建与机器人定位,这里的状态变量主要是指机器人x,y坐标位置与方向角以及地标x,y坐标位置,而系统状态变量估计、基于观测值的系统状态变量更新主要使用EKF算法。
(二) SLAM for Dummies中SLAM硬件组成
机器人采用了轮式室内机器人Evolution Robotics ER1 robot,使用里程计(odometry )预测下一时刻机器人的系统状态变量,里程计的误差要求是每移动1米的误差小于2cm,每转动45度的误差小于2度。测距模块采用Sick公司的激光雷达,其参数为角度分辨率为0.25度或0.5度,扫描范围100度或180度,测距误差正负5厘米。
(三) SLAM for Dummies中SLAM流程
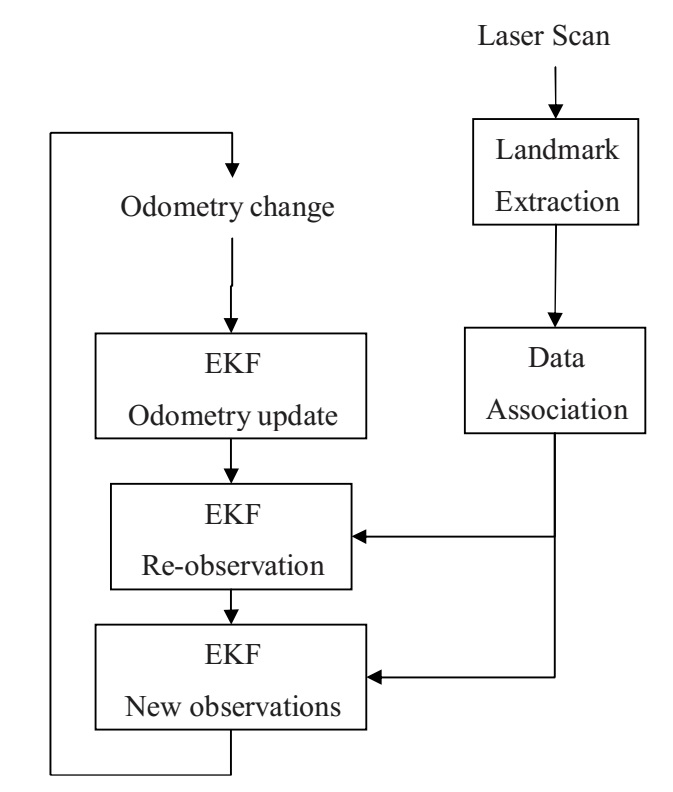
SLAM流程如下图所示,基于里程计的变化使用EKF更新系统状态变量,基于激光扫描数据抽取地标,并进行数据关联完成本次观测的地标与以前观察到地标的关联,根据数据关联的结果,即观测过程,使用EKF更新和修订基于里程计预测的系统状态变量,同时更新地标信息,增加以前没有观测到地标。
(四) SLAM for Dummies中地标的抽取
地标的选取原则:(1)地标容易重新观测到;(2)地标相互之间区分度高;(3)环境中地标数量充足;(4)地标是稳定不动的。
基于激光雷达观测数据进行地标抽取的算法:
(1)Spike地标:基于激光雷达测距结果,抽取出“点”型地标。如果2个相邻的扫描点的测距距离大于一个距离门限,认为是一个Spike地标。在平滑的环境中,Spike无法正常工作,也无法处理像人这样在环境中移动的情况
(2)RANSAC地标:基于雷达测距结果,抽取出“线”型地标。通过随机采样角度差在D度以内的激光测距结果,并通过最小均方LS近似拟合成一条直线,如果距离该直线很近的激光测距结果的样点数量大于一个指定的门限,则认为该直线为一个地标。
在EKF算法中,地标有一个相对机器人位置的距离和方向角,对于“线”型地标,通常以机器人位置到“线”型地标的垂直线长度作为地标相对机器人的距离,垂直线的夹角作为方向角。
相对而言,以上两种基于地标的算法在准确性和稳定性方面差于基于scan匹配的算法。
| 


 发表于 2018-5-10 11:32:10
发表于 2018-5-10 11:32:10